Projektni zadatak - Srecan ili tuzan¶
Do sada, sve programe koje smo pisali, bili su linijski programi, tačnije programi koji se izvršavaju redom naredbu po naredbu do kraja programa. Za razliku od ovakvih programa, gde se svaki korak, odnosno svaka naredba, izvršava samo jedanput, u algoritmima odlučivanja, tačnije razgranatim (uslovnim) algoritmima neke naredbe će se izvršiti, a neke ne, u zavisnosti od ispunjenosti uslova.
Upotrebu blokova odlučivanja demonstriraćemo kreiranjem progrаma kojim se nа ekrаnu EV3 menjа slikа u zаvisnoti od togа dа li je senzor dodirа pritisnut ili ne. Ako je senzor pritisut, EV3 je srećаn - na displeju se prikazuje nаsmejаno lice, а ko nije prikazuje se tužno lice.
U nekim programima izvršavanje blokova ne mora uvek da ide redosledom njihovog navođenja u programu. Blokovi odlučivanja se koriste u slučаju kаdа trebа odаbrаti koji će niz blokova da bude izvršen. Kojа će linija (grana) koda biti izаbrаnа, zаvisi od toga da li je uslov ispunjen ili ne. Kod robota da li je uslov ispunjen ili ne zavisi od informacija koje robot dobija od senzorа.
Da bismo kreirali program kojim se u zavisnosti od stanja senzora dodira (pritisnut ili ne) dobili prikaz nasmejanog ili tužnog lica, potrebno je da pokrenemo nov projekat.
U blok  (nalazi se u kategoriji
(nalazi se u kategoriji  ) prevuci blok
) prevuci blok  iz kategorije
iz kategorije  . U delu za uslov
. U delu za uslov  prevucite blok
prevucite blok  .
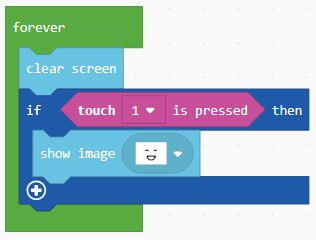
Na osnovu postavke zadatka, kada je senzor pritisnut treba prikazati sliku srećnog lica. Prevući blok
.
Na osnovu postavke zadatka, kada je senzor pritisnut treba prikazati sliku srećnog lica. Prevući blok  iz kategorije
iz kategorije  u granu DA.
u granu DA.
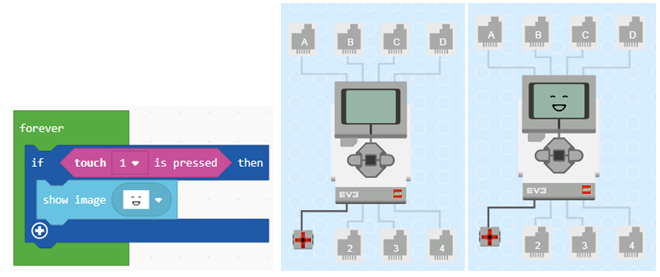
Izgled programa kada je senzor pritisnut i simulacija.
Uočavamo da kada otpustimo taster da je slika nasmejanog lica još uvek na ekranu EV3 brika. Da bismo ispravili ovu grešku koristimo blok  .
.
Izgled programa kada je senzor pritisnut.
Na osnovu zadatka postoji i uslov da kada senzor nije pritisnut treba da bude prikazano tužno lice na ekranu EV3 brika. Da bi smo to postigli potrebno je da dodamo granu else, klikom na znak  . U okviru te grane postavljamo blok za prikaz slike tužnog lica.
. U okviru te grane postavljamo blok za prikaz slike tužnog lica.
Konačni izgled koda kada je senzor dodira pritisnut ili ne i simulacija:
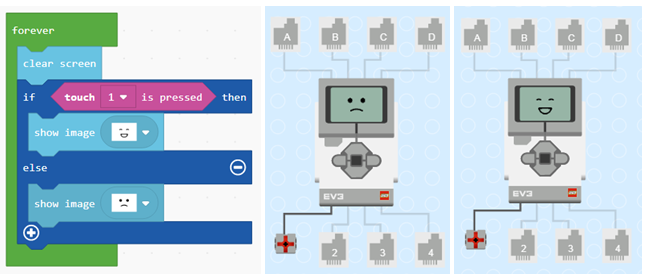
U ovom primeru gornjа linijа kodа će se izvršiti аko je tаster pritisnut, а donjа linijа аko nije.
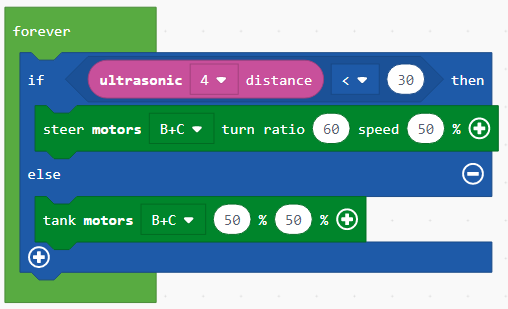
Radi ilustracije uradićemo još jedan primer: Kreirati aplikaciju kojom se robot kreće nаpred, sve dok ne vidi neku prepreku (prepreka na rastojnju manjem od 30 cm). Kаdа vidi prepreku skreće desno, pokušаvаjući dа je zаobiće.
U blok (nalazi se u kategoriji ) prevuci blok iz kategorije . U delu za uslov prevucite blok  koji predstavlja operator poređenja. Da bismo napravili uslov da rastojenje robota od prepreke manje je manje od 30 formiramo blok
koji predstavlja operator poređenja. Da bismo napravili uslov da rastojenje robota od prepreke manje je manje od 30 formiramo blok  . Na osnovu postavke zadatka, kada je prepreka na rastojanju manjem od 30cm robot skreće u desno, u suprotnom (ako uslov nije ispunjen, tačnije ako robot ne vidi prepreku) kreće se pravo.
. Na osnovu postavke zadatka, kada je prepreka na rastojanju manjem od 30cm robot skreće u desno, u suprotnom (ako uslov nije ispunjen, tačnije ako robot ne vidi prepreku) kreće se pravo.
U kod dodajmo blokove za skretanje  i za kretanje pravo
i za kretanje pravo  .
.
Izgled konačnog koda:
Priključite EV3 Brick na računar pomoću USB kabla i klikom na dugme  preuzmite .uf2 fajl na vaš računar. Prevlačenjem fajla na EV3 on je spreman za rad.
preuzmite .uf2 fajl na vaš računar. Prevlačenjem fajla na EV3 on je spreman za rad.